 Pirmame šimtmetyje prieš mūsų erą gyvenęs matematikas, mechaninių automatų konstruktorius Heronas išrado pirmąją garo mašiną. O šiandien garsios elektronikos kompanijos jau gamina humanoidus ne tik suprantančius žodžiu duotas komandas, bet ir galinčius atlikti gana sudėtingas užduotis.
Pirmame šimtmetyje prieš mūsų erą gyvenęs matematikas, mechaninių automatų konstruktorius Heronas išrado pirmąją garo mašiną. O šiandien garsios elektronikos kompanijos jau gamina humanoidus ne tik suprantančius žodžiu duotas komandas, bet ir galinčius atlikti gana sudėtingas užduotis.
Vienas pirmųjų mechaninių automatų išradėjų ir konstruktorių – pirmame šimtmetyje prieš mūsų erą gyvenęs matematikas Heronas iš Aleksandrijos. Jo įtaisų aprašymai liko iki šių dienų. Heronas buvo labai universalus žmogus. Jis išrado pirmąją žinomą garo mašiną, konstravo pneumatinius, mechaninius ir optinius įtaisus įvairiems matavimams bei stebuklams šventyklose demonstruoti, taip pat ginklus Romos kariuomenei.
Savo įtaisus Heronas aprašė keliolikoje knygų. Pavyzdžiui, jis sukonstravo automatinę šventyklos durų valdymo sistemą ir šventinto vandens automatą.
Šventyklos durys atsidarydavo įžiebus šventąją ugnį. Ją užkūrus, oras pagrindiniame rezervuare kaito ir plėtėsi. Plėsdamasis jis stūmė vandenį iš pagrindinio rezervuaro į pakabintą indą. Dėl padidėjusio svorio indas leidosi ir suko mechanizmą, kuris atverdavo duris ir pakeldavo svarstį. Užgesinus ugnį, vanduo iš indo imdavo tekėti atgal į pagrindinį rezervuarą, o svarstis leisdamasis užverdavo duris. Šventinto vandens mechanizmas mažai kuo skyrėsi nuo dabartinių skysčių automatų.
Automato viršuje buvo plyšys aukai (monetai) įmesti. Moneta krisdavo ant svirties galo, svirtis atsukdavo čiaupą ir pradėdavo tekėti šventintas vanduo. Svirčiai pasvirus, moneta nuslysdavo į surinktuvą, ir svirtis užsukdavo čiaupą. Senovėje šie automatai nebuvo populiarūs, nes žyniai nenorėjo atskleisti stebuklų paslapties, be to, automatams buvo reikalingi energijos šaltiniai (laužo ugnis, tekantis vanduo), kurių panaudojimo galimybės buvo labai ribotos.
Pirmąjį žinomą žmogaus pavidalo geležinį robotą XIII amžiuje sukūrė didelės erudicijos vienuolis mokslininkas Albertas Didysis (Albertus Magnum). Robotas mokėjo atidaryti duris ir nusilenkti įeinantiesiems. Tačiau vienas svečias, pamanęs, kad tai – piktoji dvasia, jį sukapojo kardu.
XVI amžiaus pabaigoje pradėjus naudoti kompaktinį energijos kaupiklį – spyruoklę, automatai imti taikyti plačiau. Spyruoklės buvo dedamos į laikrodžius su įvairiomis judančiomis figūrėlėmis ir muzikines dėžutes. Taip pat buvo gaminami įvairūs žaisliniai automatai, imituojantys paukščius, žvėris ir net žmones (androidai).
Prancūzas iš Grenoblio Jaquesas de Vaucansonas sukūrė įdomų automatą – antį, kuri ne tik kvarksėjo, lingavo, plaukiojo, judino galvą, kedeno plunksnas, bet ir lesė, virškino bei tuštinosi. Žinomas ir šio prancūzo žmogaus ūgio fleitininkas, kuriame buvo valdomo slėgio dumplės. Androidas turėjo mechaninius pirštus ir tikra fleita galėjo pagroti net 11 melodijų.
Šveicaras Pierre'as Jacque'as Drozas pagarsėjo savo raštininku ir dailininku, kurie buvo maždaug penkerių metų vaiko ūgio.
Visi šie androidai buvo ne tik mechanikos šedevrai, bet ir meno kūriniai. Tuo metu buvo sukurta daug įvairių androidų ir net pradėta jais piktnaudžiauti. Pavyzdžiui, buvo sukonstruotas „šachmatininkas“, kuris, sumokėjus tam tikrą sumą, sutikdavo sužaisti šachmatų partiją. Savo sugebėjimais jis gana ilgai stebino partnerius, kol paaiškėjo, kad „šachmatininke“ slepiasi neblogai šį žaidimą žaidžiantis liliputas.
Viduramžių automatus valdė įranga, sudaryta iš įvairių velenėlių, krumpliaračių ir dantračių. Dauguma jų vykdydavo tą pačią programą (atlikdavo tuos pačius veiksmus), mat sumanius pakeisti programą reikėdavo keisti visą mechaninį valdymo įtaisą. Nors androidų atliekami veiksmai buvo primityvūs, tačiau jie buvo naudingi tobulinant žmogaus judesius imituojančius mechaninius įtaisus, nuo kurių labai priklausė žmogaus pavidalo robotų humanoidų sugebėjimai.
Atradus elektrą, 1885 m. Frankas Reade'as sukonstravo „elektrinį žmogų“. XX amžiaus pradžioje buvo sukurti garsu ir radijo signalu per atstumą valdomi robotai. Kai kuriems jų buvo galima žodžiu ar radijo signalais liepti atsikelti, atsisėsti, pakelti ir nuleisti rankas, judinti pirštus, šaudyti revolveriu, kalbėti, švilpauti, dainuoti ir atlikti kitas paprastas užduotis. Kai kurie robotai svėrė net keletą tonų, tačiau dažniausiai jie buvo naudojami tik reklamai.
Ankstyvųjų humanoidų kūrėjų pastangos nenuėjo veltui ir jų laimėjimai buvo pritaikyti gaminant pramoninius robotus manipuliatorius. Pirmasis programuojamas robotas buvo sukurtas 1954 m., o pirmieji programuojami pramoniniai manipuliatoriai – 1959 m. Programuojamų robotų atsiradimą lėmė sparti elektronikos plėtra, o jų valdymo galimybes labai didino mikroelektronikos pažanga.
1968 m. Stradfordo universitete buvo sukurtas pirmasis aplinką jaučiantis iš akumuliatorių maitinamas robotas „Shakey“. Į jį buvo įdiegta dirbtinės regos sistema, kurią sudarė televizijos kamera aplinkai apžvelgti bei kompiuteris iš kameros gautiems vaizdams analizuoti, taip pat įrengti lietimo jutikliai. Šis robotas savarankiškai galėjo nugabenti tam tikrą objektą iš vieno kambario į kitą.
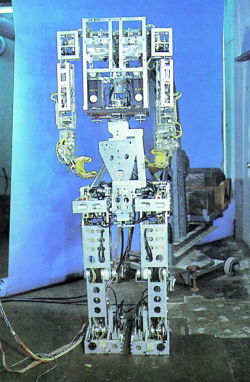
Nors buvo masiškai gaminami bei naudojami pramoniniai robotai, tačiau nepamiršti ir humanoidai. Jiems ypač daug dėmesio skyrė japonų konstruktoriai. Pirmuoju humanoidu laikomas 1973 m. Japonijos Vasedos universitete sukurtas robotas WABOT-1. Į jį buvo įdiegta regos sistema, robotas galėjo judėti, bendrauti japonų kalba, rankomis paimti daiktus. Savo intelektu jis prilygo maždaug 1,5 metų vaikui.
Humanoidų kūrėjų darbus tęsė žinomos bendrovės „Honda“ ir „Fujitsu“. Jos siekė sukurti „protingus“ ir palyginti nebrangius vaikščiojančius humanoidus, kurie gebėtų atlikti įvairius namų darbus ir būtų įperkami pavieniams žmonėms. Tačiau bene sunkiausia buvo išmokyti humanoidus žmogaus judesių (pvz., vaikščioti, bėgioti, šokinėti). Dėl humanoidų „proto“ (humanoido kompiuterio) problemų nekilo, mat labai sparčiai plėtojantis elektronikai ir informatikai vis mažesni kompiuteriai galėjo įveikti sudėtingesnes užduotis.
Žingsniuojančių humanoidų istoriją 1986 m. pradėjo „Honda“, sukūrusi pirmąjį einančio aparato prototipą – „žingsniuojančias kojas“ E0. Šį aparatą sudarė dvi kojos, kurios per penkias sekundes galėjo žengti vieną žingsnį pirmyn.

„Kojos“ ėjo smarkiai krypuodamos, nes aparato svorio centras turėjo būti pėdos plote. Tokiai, regis, labai paprastai užduočiai atlikti reikėjo labai sudėtingo mechanizmo
Net penkeri metai buvo sugaišti „žingsniuojančių kojų“ krypavimui mažinti, pusiausvyros mechanizmui tobulinti ir žingsniavimui lygiu paviršiumi spartinti. Kojų prototipas E3 jau žingsniavo trijų kilometrų per valandą greičiu. Nuo 1991 iki 1993 m. kojos buvo patobulintos ir jau galėjo lipti laiptais.
1993 m. buvo sukurtas vaikščiojančio humanoido prototipas P1, jau turėjęs „kūną“ ir rankas. Jame veikė energijos šaltinis ir kompiuteris.
P1 buvo 192 cm ūgio ir 175 kg svorio. Šis humanoidas galėjo įjungti ir išjungti jungiklį, nuspausti durų rankeną, nešti daiktus.
1996 m. „Honda“ viešai pademonstravo humanoido prototipą P2, galėjusį normaliai vaikščioti, lipti laiptais, stumti vežimėlį. P2 buvo 182 cm ūgio ir 210 kg svorio. Visa įranga (kompiuteriai, maitinimo šaltinis, elektros varikliai, ryšio sistema) buvo P2 kūne.
Paskutinis humanoido prototipas P3 – maždaug japono ūgio storas „astronautas“ su kuprine ant pečių. Jo ūgis – 160 cm, svoris – 130 kg.
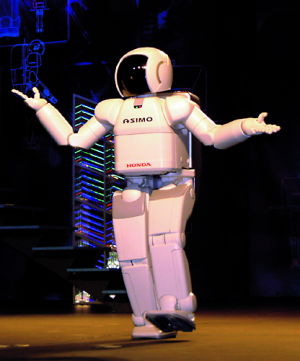
Sugaištus 15 metų ir dideles pastangas vainikavo 2001 metais sukurtas šiuo metu tobuliausias namams skirtas humanoidas „Asimo“ (Advanced Step in Innovative Mobility).
„Asimo“ primena 10 metų berniuką. Jo ūgis 120 cm, o svoris su kuprine – 43 kg. 7,7 kilogramo akumuliatorius suteikė humanoidui pusės valandos autonomiškumą. 2001 metais „Asimo“ vaikščiojo panašiai kaip žmogus. Jis galėjo eiti pirmyn, į šalis ir atgal, nesustodamas keisti judėjimo kryptį, laiptais lipti aukštyn ir žemyn, šokti.
2002 m. „Asimo“ išmoko bėgti. Bėgimas nuo ėjimo skiriasi tuo, kad tam tikrą laiką abi kojos nesiekia žemės, todėl daug sunkiau išlaikyti pusiausvyrą. Humanoido gebėjimas atlikti įvairius judesius daugiausia priklauso nuo jo mechanizmų judėjimo laisvės laipsnių. „Asimo“ galvą galima atlošti ir palenkti į priekį, pasukti į kairę ir dešinę. Abi jo rankos turi po penkis laisvės laipsnius, pečiai – po du, kuriuos galima pakelti ir nuleisti, pastumti pirmyn ir atgal. Alkūnės, riešai ir plaštaka turi po vieną laisvės laipsnį, kojos – po šešis. „Asimo“ eina 1,6 km/val. greičiu.
Šis humanoidas ne tik supranta žodžiu duotas komandas, bet ir skiria įvairius aplinkos objektus, atpažįsta jų judesius ir į juos reaguoja.
Jis gali atpažinti keliolikos žmonių veidus ir kreiptis į juos vardais, atsakyti į tam tikrus klausimus, atlikti gana sudėtingas užduotis.
„Asimo“ galima valdyti nešiojamuoju pultu, prijungti prie kompiuterių tinklo, interneto. Bendrovė šį humanoidą nuomoja įvairioms firmoms. Už metų nuomą tenka mokėti apie 150 000 JAV dolerių.
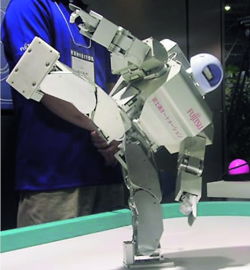
Humanoidus konstruoja ir kitos bendrovės. Pavyzdžiui, „Fujitsu“ gamina 48 cm ūgio robotą „Hoap-1“ (Humanoid for Open Architecture Platform), kuris sveria šešis kilogramus ir kainuoja daugiau nei 100 000 litų.
„Sony“ kūrinys – 58 cm ūgio humanoidas QRIO, sveriantis 6,5 kilogramo ir kainuojantis taip pat apie 100 000 litų. Kai kurie specialistai mano, kad po 40 metų humanoidai bus labai panašūs į žmones ir savo intelektu nė kiek jiems nenusileis.

![]()