 Šiuolaikinėse mechatroninėse sistemose, kai reikalingas slenkamasis judesys, dažnai naudojamos tiesiaeigės elektros pavaros. Tiesiaeigio asinchroninio variklio idėja kilo maždaug prieš 100 metų. 7-tame dešimtmetyje Eric Laithwaite paskelbė straipsnius apie plokščiųjų trifazių asinchroninių variklių teoriją ir taikymą. Dar 20 metų prireikė, kad atsirastų poreikis konstruoti ir gaminti tiesiaeigius variklius.
Šiuolaikinėse mechatroninėse sistemose, kai reikalingas slenkamasis judesys, dažnai naudojamos tiesiaeigės elektros pavaros. Tiesiaeigio asinchroninio variklio idėja kilo maždaug prieš 100 metų. 7-tame dešimtmetyje Eric Laithwaite paskelbė straipsnius apie plokščiųjų trifazių asinchroninių variklių teoriją ir taikymą. Dar 20 metų prireikė, kad atsirastų poreikis konstruoti ir gaminti tiesiaeigius variklius.Įvadas
Šiuolaikinėse mechatroninėse sistemose, kai reikalingas slenkamasis judesys, dažnai naudojamos tiesiaeigės elektros pavaros, leidžiančios išvengti papildomų mechaninių grandžių. Tiesiaeigio asinchroninio variklio idėja kilo maždaug prieš 100 metų. Septintajame dešimtmetyje Eric Laithwaite paskelbė keletą straipsnių apie plokščiųjų trifazių asinchroninių variklių teoriją ir taikymą. Dar apie 20 metų prireikė, kad atsirastų poreikis konstruoti ir gaminti tiesiaeigius variklius ir išryškinti jų teigiamybes [1]. Kuriant tiesiaeiges pavaras buvo įrodyta, kad tokios sistemos su tiesiaeigiais asinchroniniais varikliais (TAV) dažnai veikia ekonomiškiau negu hidraulinės arba elektromechaninės.
Šiuo metu TAV taikomi konteinerių transportavimo sistemose [2], pašto rūšiavimo įrenginiuose [3], tekstilės pramonės mechanizmuose, staklių pavarose, jungtuvų, sklendžių, stūmiklių pavarose [4], liftų kėlimo ir durų pavarose [5].
Kiekvienas technologinis procesas kelia specifinius reikalavimus tiesiaeigei mechatroninei sistemai. Kadangi tiesiaeigio variklio energetinės charakteristikos prastesnės negu sukiojo, tai tiesiaeigės mechatroninės sistemos pranašumai atsiskleidžia tik tuo atveju, jei jis yra projektuojamas konkrečiam įrenginiui ir tampa neatsiejama jo dalimi. [1] pabrėžiama, kad dinaminės tiesiaeigės pavaros savybės visuomet būna geresnės negu sukiosios, nes tiesiaeigės pavaros judančių dalių inercija yra mažesnė už sukiosios pavaros besisukančių dalių inerciją. Be to, tiesiaeigės pavaros neturi reduktorių, todėl sistemoje išvengiama laisvumo. Kadangi tiesiaeigė pavara turi mažiau mechaninių grandžių, todėl ji ne tokia tampri kaip sukioji. Dėl šių savybių tiesiaeigių pavarų dinamikos rodikliai yra geresni.
Kuriant TAV turi būti analizuojami jo valdymo klausimai. Pagrindiniai TAV valdymo parametrai yra jo greitis ir kuriama jėga. Jei technologinio proceso metu nereikia keisti ar palaikyti pastovaus TAV greičio, tai TAV pagrindiniu projektavimo parametru tampa variklio poliaus žingsnis, kuris nusako jo sinchroninį greitį v0 :

čia τ – poliaus žingsnis; f – maitinimo įtampos dažnis.
Kai greitį reikia keisti ar palaikyti pastovų, taikomas dažninis [6, 7] arba impulsinis valdymas [8]. Kai kurie technologiniai procesai reikalauja tiksliai pozicionuoti vykdymo elemento judamąją dalį. Pozicionuojant didelę reikšmę turi tiesiaeigio variklio stabdymas. Kartais stabdymo metu reikia palaikyti pastovų stabdymo pagreitį, pavyzdžiui, liftuose [5], arba nustatytą stabdymo trukmę.
Tais atvejais, kai technologinis procesas reikalauja stabdymo metu riboti pagreitį ar keisti stabdymo proceso trukmę, reikia nagrinėti ne tik statinius, bet ir dinaminius elektrinio stabdymo režimus. Tiesiaeigių pavarų dinaminiai stabdymo režimai nėra kaip reikiant ištirti.
Tiesiaeigio asinchroninio variklio stacionariųjų stabdymo režimų tyrimas, paremtas elektromagnetinio lauko teorija, leido nustatyti įvairių stabdymo būdų efektyvumą ir sukurti naujus stabdymo būdus ir schemas [9].
Nestacionaraus stabdymo režimo tyrimai atlikti atsižvelgiant į pagreičio įtaką variklio charakteristikoms, [10], kai aktyviųjų zonų skaičius yra lyginis. Tyrimų metu buvo priimta, kad pagreitis atskiruose laiko intervaluose yra pastovus. Iš tiesų pagreitis viso stabdymo proceso metu kinta. Todėl [11,12,13] nagrinėja tiesiaeigių pavarų dinaminius stabdymo režimus, esant įvairiems variklio apvijų jungimo būdams. [11,12] išnagrinėtas dinaminis stabdymas, o vienfazio stabdymo problemos nagrinėjamos [13].
Tiesiaeigės elektros pavaros nesimetrinių dinaminių stabdymo režimų modelis
Kai TAV yra maitinamas simetrine įtampa ir jo visos fazinės varžos yra vienodos, tai jo matematiniai ir kompiuteriniai modeliai, sudaryti x, y ir α, β koordinačių sistemose, pateikti [14]. Naudojant šiuos modelius galima tirti variklinį režimą ir priešinio jungimo stabdymo režimus. Stabdant vienfaziu ar dinaminiu būdu, variklio apvijų sujungimo schemos [12, 13] rodo, kad variklis maitinamas nesimetrine įtampa. Todėl tiriant šiuos režimus, reikia atsižvelgti į variklio apvijų jungimo būdą.
Nesimetriniams dinaminiams tiesiaeigių pavarų režimams tirti modelis sudaromas taikant simetrinių dedamųjų metodą, kuris yra pagrįstas bet kokios nesimetrinės sistemos išskaidymu į tris simetrines dedamąsias [11].
Modelį sudaro trys TAV modeliai, kurie atitinka simetrines tiesioginę, atvirkštinę ir nulinę variklio įtampos dedamąsias. Tiesioginės dedamosios modelio lygtys pateiktos [11]. Atvirkštinės dedamosios modelio lygtys gaunamos į tiesioginės dedamosios lygtis vietoj slydimo s įrašant 2-s.
Tuomet tiesioginės dedamosios lygtyse [14] esantis narys v0 −v pertvarkomas taip:
Todėl atvirkštinės dedamosios lygtyse daugiklis v0 −v bus:

Tuomet diferencialinių lygčių sistema, leidžianti apskaičiuoti atvirkštinės įtampos dedamosios kuriamą jėgą, yra tokia:
TAV induktoriaus srovės dedamosios apskaičiuojamos pagal lygtis
o fazinė srovė randama taip:

Lygčių sistema (4) sprendžiama kartu su pagrindine pavaros judesio lygtimi

ir lygtimi nueitam keliui rasti:

Lygtyse (4 – 6) pažymėta: Ψx1, Ψy1 – pilnutinio statoriaus srauto projekcijos į x, y ašis; Ψx2, Ψy2 – pilnutinio rotoriaus srauto projekcijos į x, y ašis; U1m – tinklo fazinės įtampos amplitudinė vertė; γ – tinklo įtampos fazė įjungimo metu; τ – polių žingsnis; v0 – variklio tuščiosios veikos greitis; v – variklio greitis; F – variklio jėga; Fs – statinė pasipriešinimo jėga; kiti koeficientai randami iš variklio apvijų parametrų – aktyviųjų ir induktyviųjų varžų [11].
Lygtyje (7) variklio sukuriamą jėgą F sudaro tiesioginės Ft ir atvirkštinės dedamosios Fa algebrinė suma.
Modelio, sudaryto tiesioginei įtampos dedamajai, rezultatas yra variklio sukuriama jėga ir greitis. Modelis, sudarytas atvirkštinei įtampos dedamajai (pagal (4–8) lygtis), sukuria priešingos krypties jėgą. Abiejų modelių sukurtos jėgos algebriškai sumuojamos ir ši suminė jėga veikia antrinį elementą. Antrinis elementas juda greičiu v. Nulinė dedamoji jėgos nekuria.
Projektuojant naujas ir tiriant esamas pavaras, svarbu turėti patogią naudoti programą. Remiantis šiuo matematiniu modeliu, buvo sudarytas algoritmas ir sukurta vaizdi ir patogi naudoti programa „Matlab“ programinėje aplinkoje. 1 pav. parodytas programos aktyvusis langas. Naudojantis šia programa, lango apačioje įvedami tiriamosios pavaros parametrai. Paspaudus vieną iš dešinėje pusėje esančių mygtukų, ekrane atsiranda norima laikinė charakteristika.
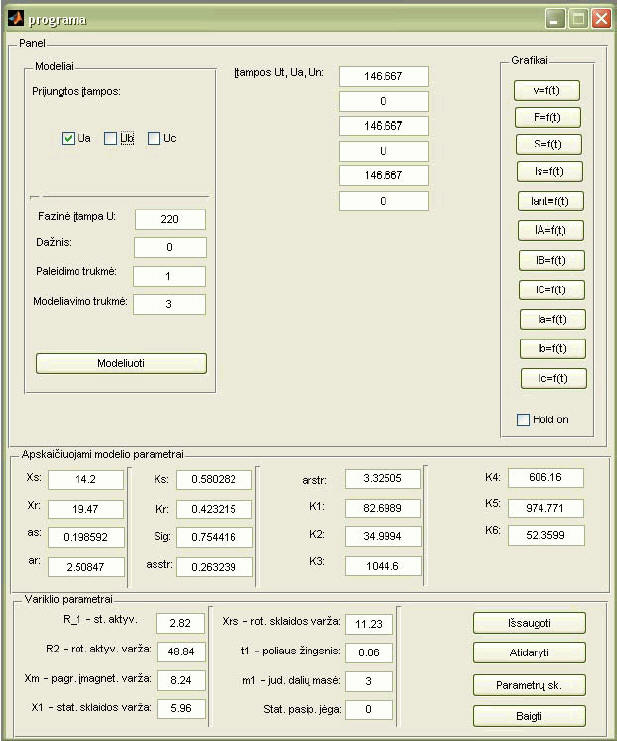
1 pav. TAV simetrinių ir nesimetrinių režimų modeliavimo programos aktyvusis langas (Spausti ant paveikslėlio)
Sudarytas modelis leidžia tirti ne tik variklio paleidimo režimą, bet ir įvairius nesimetrinius (dinaminio stabdymo, vienfazio stabdymo) režimus, palyginti gautas charakteristikas, įvertinti variklio parametrų įtaką dinaminėms charakteristikoms. Variklio apvijų sujungimo schemos dinaminio ar vienfazio stabdymo metu yra pateiktos [12,13]. Dinaminiam ir vienfaziam stabdymo režimams palyginti tiriami modeliai, kai prie vienos fazinės apvijos prijungiama nuolatinė ar kintamoji įtampa. Įtampų vertės parenkamos taip, kad efektinė kintamosios srovės vertė būtų lygi nuolatinės srovės vertei.
Imitacijos rezultatai
2 pav. parodyta, kaip keičiasi greitis paleidimo ir stabdymo metu, kai TAV stabdomas dinaminiu ir vienfaziu būdais, esant vienodai statoriaus srovei. Stabdant dinaminiu būdu, variklis sustoja viena sekunde greičiau negu vienfazio stabdymo metu.
2 pav. TAV greičio kitimas paleidimo ir stabdymo metu, kai jis stabdomas dinaminiu ir vienfaziu būdais, esant vienodai statoriaus srovei
3 pav. parodyti TAV paleidimo, esant simetrinei įtampai, ir dinaminio bei vienfazio stabdymo metu sukuriamos jėgos grafikai. Dinaminio stabdymo metu sukurta vidutinė jėgos vertė yra didesnė negu vienfazio stabdymo, todėl ir TAV sustoja greičiau (2 pav.).
3 pav. TAV jėgos kitimas paleidimo ir stabdymo metu, kai jis stabdomas dinaminiu ir vienfaziu būdais, esant vienodai statoriaus srovei
4 pav. pateikta variklio srovės kitimo grafikas, kai jis paleidžiamas ir stabdomas vienfaziu būdu, prijungus prie A fazės kintamąją įtampą. Stabdymo srovė įjungiama laiko momentu t = 1 s. Paleidimo srovės pirmasis maksimumas tik 3 % viršija nusistovėjusią srovės vertę, o vienfazio stabdymo metu nejuntama jokio fazinės srovės padidėjimo.
4 pav. Statoriaus srovės kitimas paleidimo ir vienfazio stabdymo metu
Tačiau 5 pav. pateiktas antrinio elemento srovės grafikas rodo, kad antriniame elemente srovės pirmasis maksimumas 50 % didesnis už nusistovėjusią srovę. 4 ir 5 pav. rodo, kad, vienfaziu būdu stabdomam varikliui sustojus, reikia išjungti stabdymo įtampą, nes ji kuria srovę induktoriuje ir stovinčiame antriniame elemente.
5 pav. Variklio antrinio elemento srovės kitimas paleidimo ir vienfazio stabdymo metu
Išvados
- Sudaryta programa leidžia imituoti tiesiaeigės pavaros dinaminius stabdymo režimus, tiekiant nuolatinę ar kintamąją srovę į skirtingais būdais sujungtas induktoriaus apvijas.
- Stabdant nuolatine srove, variklis sustoja greičiau negu stabdant kintamąja srove, kai abiem atvejais įjungiama stabdymo srovė tik į vieną variklio apviją su sąlyga, kad stabdymo metu kintamoji srovė lygi nuolatinei srovei.
- Stabdant vienfaziu būdu, varikliui sustojus, reikia išjungti stabdymo įtampą, nes ji kuria srovę induktoriuje ir stovinčiame antriniame elemente.
Literatūra
- Budig P. K. The application of linear motors. The third International Power Electronics and motion Control conference 2000. – Vol.3. – P. 1336–1341.
- Abdou, G.H. Application of LIM in flexible manufacturing systems // Programmable Control and Automation Technology Conference and Exhibition. Conference Proceedings., Fourth Annual Canadian. – 1988. – P. 1–5.
- Yuynue Y. Application of the linear induction motors in the postal mechanical system // Proceedings of the International Conference on Electrical Machines and Systems. − 2001. ICEMS 2001. − Vol.23. − P. 964–967.
- Poška A. Specialiosios automatinės sistemos. – Vilnius: Technika, 1995. – 204 p.
- Morizane T., Masada E. Study on the feasibility of aplication of linear induction motor for vertical movement // IEEE transactions on magnetics. − 1993. − Vol.29, No 6. − P. 2938–2940.
- Bucci G., Meo S., Ometto A., Scarano M. The control of LIM by a generalization of standard vector techniques // Proceedings of the International Conference on Industrial Electronics, Control and Instrumentation. – 1994. – Vol.1. – P. 623–626.
- Boldea I. Linear electric actuators and their control: a review // Proceedings of the 10th International Conference European Power and Drives Association PEMC 2002, 9-11 September 2002, Cavtat & Dubrovnik, Croatia. ISBN: 953-184-047-4. – P. 12–19.
- Poška A., Rinkevičienė R., Teišerskas Č. Tiesiaeigės elektros pavaros impulsinis valdymas// Elektrotechnika: Mokslo darbai. – Kaunas: Technologija, 1997. – Nr. 21(30). – P. 137–140.
- Smilgevičius A. Tiesiaeigių asinchroninių variklių stabdymo tyrimai Lietuvoje // Elektronika ir elektrotechnika. ISSN 1392-1215. − Kaunas: Technologija, 2005. − Nr. 1(57). − P. 42–47.
- .Каралюнас Б. С. Нестационарный режим динамическо- го торможения линейного асинхронного двигателя: Дисс. на соиск. уч. ст. канд. техн. наук/ Ленинградский и-т авиационного приборостроения.–Ленинград, 1983.– 235с.
- Rinkevičienė R., Lisauskas S., Kundrotas B. Tiesiaeigės pavaros dinaminio stabdymo režimo modeliavimas// Energetikos ir elektrotechnikos technologijos: Konferencijos pranešimų medžiaga. – Kaunas. 2004.– P. 150–155.
- Rinkevičienė R., Lisauskas S. Tiesiaeigių pavarų dinaminiai stabdymo režimai // Elektronika ir elektrotechnika. – Kaunas: Technologija, 2005. – Nr. 4(60). − P. 37–40.
- Rinkevičienė R., Lisauskas S. Tiesiaeigės elektros pavaros vienfazio stabdymo dinaminis modelis// Energetikos ir elektrotechnikos technologijos: Konferencijos pranešimų medžiaga.– Kaunas. 2005.– P. 122–127.
- Rinkevičienė R., Lisauskas S. Tiesiaeigių mechatroninių sistemų modeliai // Elektronika ir elektrotechnika. ISSN 1392-1215. − Kaunas: Technologija, 2003. − Nr. 4(46). − P. 69–73.
R. Rinkevičienė, S. Lisauskas. Tiesiaeigio asinchroninio variklio nesimetrinių dinaminių stabdymo režimų tyrimas //Elektronika ir elektrotechnika. – Kaunas: Technologija, 2006. – Nr. 1(65) . − P. 60–63.
![]()