 „Balancing Cube“ – robotas, galintis išlaikyti pusiausvyrą stovėdamas ant bet kurio savo kampo, netgi jį stumtelėjus. Robotui nukrypus nuo pusiausvyros padėties, pirminei būsenai atstatyti naudojami šeši motorizuoti balansavimo mechanizmai.
„Balancing Cube“ – robotas, galintis išlaikyti pusiausvyrą stovėdamas ant bet kurio savo kampo, netgi jį stumtelėjus. Robotui nukrypus nuo pusiausvyros padėties, pirminei būsenai atstatyti naudojami šeši motorizuoti balansavimo mechanizmai.„Balancing Cube“ – robotas, galintis išlaikyti pusiausvyrą stovėdamas ant bet kurio savo kampo, netgi jį stumtelėjus. Robotui nukrypus nuo pusiausvyros padėties, pirminei būsenai atstatyti naudojami šeši motorizuoti balansavimo mechanizmai.
 „Balancing Cube“ savo išvaizda primena modernaus meno skulptūrą, tačiau iš tiesų tai yra robotas. |
|---|
Švytuokles primenantys balansavimo moduliai sumontuoti vidiniuose šio savotiško kubo paviršiuose. Jie pastoviai reguliuoja savo svorio centro padėtis – taip, kad visos struktūros svorio centras išliktų pusiausvyrai išlaikyti reikalingoje padėtyje.
Roboto autoriai ETH Zurich universiteto specialistai Raffaello D'Andrea, Sebastianas Trimpe ir Mattas Donovanas teigia, jog jų kūrinys yra pusiau menas, pusiau technologiją. Įkvėpimo jie sėmėsi iš įžymiojo cirko Cirque du Soleil, kurio akrobatai iš savo pačių kūnų sudaro tarsi visiškai pusiausvyros negalinčias išlaikyti figūras. Bet nepaisant to, akrobatai pusiausvyrą išlaikyti sugeba. D'Andrea iškėlė idėja – ar įmanoma sukurti mašiną, kuri galėtų atlikti panašius veiksmus – mašiną, kurios vidiniai komponentai tarpusavyje derintų atliekamus veiksmus, kad bendra jų sudaroma sistema išliktų stabili? Autorių darbo rezultatą galite pamatyti tolesnėje vaizdo medžiagoje.
Taigi kaip visa tai veikia?
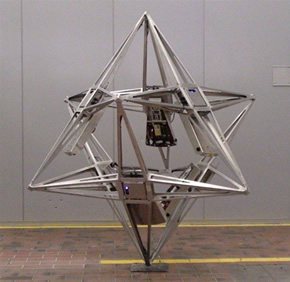 Ant vienos viršūnės stovintis „Balancing Cube“. ©Institute for Dynamic Systems and Control - ETH Zurich |
|---|
„Balancing Cube“ iš esmės yra paskirstyto valdymo platforma. Kiekvienas kubo modulis yra autonominis – turi atskirą kompiuterį, akumuliatorių, motorą, triašius akselerometrus ir triašius giroskopus. Moduliai vienas su kitu keičiasi savo surinkta informacija apie pagreitį ir posūkio kampą, o duomenys yra perduodami per magistralinį informacijos tinklą. Tada kiekvienas mazgas suderina savo turimą informaciją su bendrais duomenimis ir pagal tai sprendžia, kokie turi būti atlikti veiksmai, norint išlaikyti tinkamą struktūros orientaciją. Pagal priimtą sprendimą suformuojamas reikiamas atitinkamo motoro valdymo signalas. Valdymo algoritmas sukurtas taip, kad būtų įvertintas gravitacijos poveikis ir kubo judėjimo greitis. Tačiau tokiai funkcijai atlikti netaikomas dinaminis paties kubo modelis, t. y. tas pats valdymo metodas veikia tiek statikoje, tiek kubui judant.
Įtaiso korpusas pagamintas iš aliuminio. Kiekvienos kraštinės ilgis yra 1,2 metro, o kubui stovint ant kurio nors kampo, bendras jo aukštis siekia apie 2 metrus. Išoriškai jis primena žvaigždę, nes konstrukcija sudaryta iš X formos elementų – kubo forma tampa akivaizdi, įsivaizduojant jo viršūnes jungiančias linijas.
 Menamas kubo linijas vaizduojantis brėžinys. ©Institute for Dynamic Systems and Control - ETH Zurich |
|---|
Projekto tikslas neapsiriboja vien tik aukštosiomis technologijomis paremto meno kūrinio sukūrimu. Mokslininkai taip pat norėjo ištirti paskirstytojo valdymo pranašumus ir ribas. Jie jau anksčiau žinojo, kad tokio tipo savaime susibalansuojantiems mechanizmams nėra būtina dalintis absoliučiai visais jų jutiklių surinktais duomenimis. Tačiau tyrinėtojai norėjo išsiaiškinti tiksliai, kuri konkrečiai informacija gali būti „praleidžiama“.
Aparatinės dalies požiūriu, tyrinėtojai pasirinko modulinį dizainą. Pagrindinis reikalavimas buvo tai, kad kiekvienas modulis galėtų veikti visiškai savarankiškai. Ir iš tikrųjų, kiekvienas mechanizmas gali būti pritaikytas konstruojant kokius nors kitus įrenginius. Paskutinis, tačiau kritiškai svarbus projekto reikalavimas – aparatūra turėjo būti pakankamai atspari, kad atlaikytų eksperimentų metu pasikartojančius konstrukcijos griuvimus.
Parengta pagal:
- Self-Balancing Robot (Neatorama);
- Amazing Robotic Sculpture Balances Itself on One Corner (IEEE Spectrum).