 Panašu, jog pamažu artėja laikai, kuomet automobilių valdymas nebebus patikėtas vien tik žmogui. O galbūt ateityje apskritai, žmogus tebus tik keleivis. Dar vieną žingsni šia linkme žengė „Nissan“ kompanija, CEATEC parodoje pristačiusi kol kas dar koncepcinį robotą-automobilį. Siekdama sumažinti automobilių avaringumą kompanijos tyrimų centras kartu su Tokijo universiteto mokslininkais sukūrė BR23C koncepcinį robotą, galėsiantį ateityje padėti valdyti automobilį.
Panašu, jog pamažu artėja laikai, kuomet automobilių valdymas nebebus patikėtas vien tik žmogui. O galbūt ateityje apskritai, žmogus tebus tik keleivis. Dar vieną žingsni šia linkme žengė „Nissan“ kompanija, CEATEC parodoje pristačiusi kol kas dar koncepcinį robotą-automobilį. Siekdama sumažinti automobilių avaringumą kompanijos tyrimų centras kartu su Tokijo universiteto mokslininkais sukūrė BR23C koncepcinį robotą, galėsiantį ateityje padėti valdyti automobilį.Panašu, jog pamažu artėja laikai, kuomet automobilių valdymas nebebus patikėtas vien tik žmogui. O galbūt ateityje apskritai, žmogus tebus tik keleivis. Dar vieną žingsni šia linkme žengė „Nissan“ kompanija, CEATEC parodoje pristačiusi kol kas dar koncepcinį robotą-automobilį, galinti išvengti kliūčių.
Siekdama sumažinti automobilių avaringumą „Nissan“ kompanijos tyrimų centras (Nissan Motor Co.'s Advanced Technology Center) kartu su Tokijo universiteto mokslininkais sukūrė BR23C (Biomimetic Car Robot Drive) koncepcinį robotą, galėsiantį ateityje padėti valdyti automobilį.
Koncepcinis BR23C robotas
©Nissan
Tiesa, įrenginys ir pati technologija vis dar derinimo ir testavimo lygyje, tad kada ir kokiu pavidalu ji atkeliaus (jei apskritai atkeliaus) į automobilius, dar neaišku. Tačiau tikėtina, jog kažkuri iš panašių idėjų jau ir netolimoje ateityje suras savo vieta naujuose automobiliuose.
Testuojamo roboto veikimo principas nėra kažkuo išsiskiriantis. Iš principo tai „protingas“ daviklis, galintis stebėti automobilio priekyje esantį kelią (180 laipsnių kampu) ir pastebėjęs kliūtį, įvertinti atstumą iki jos ir gautus duomenis nusiųsti pagrindiniam borto kompiuteriui. Jeigu kliūtis bus pavojingu atstumu, pati borto kompiuteris nelaukdamas vairuotojo reakcijos pasuks ratus, siekdama jos išvengti.

Automobilio saugumo zona
©Nissan
Svarbiausia užduotis ir iššūkis inžinieriams ir mokslininkams buvo BR23C patikimos ir „protingos“ stebėjimo sistemos sukūrimas. Tam mokslininkai panaudojo „Laser Range Finder“ (LRF) technologiją, o „akies“ struktūrą pasiskolino iš bičių. Bitės sugeba matyti aplinką 360 laipsnių kampu. Mokslininkams pritaikius LRF technologiją, pavyko pasiekti 180 laipsnių kampo matomumą, tiesa kol kas 2 metrų spinduliu. Kol kas sistemos veikimas nedetalizuojamas, tačiau iš kompanijos pateiktų iliustracijų galima susidaryti bendrą vaizdą.
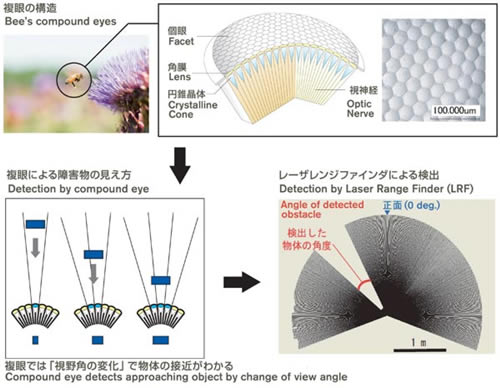
Bitės regėjimo sistema ir jos pritaikymas naujajam davikliui
©Nissan
Nissan atstovai akcentuoja, jog naujovėje pritaikyta ne tik bičių akies struktūra, bet ir pats reakcijos mechanizmas. Kuomet bitės regėjimo lauke atsiranda kliūtis, ji instinktyviai daro erdvinį judesį, siekdama jos išvengti. Panašiai turėtų elgtis ir BR23C robotas – kadangi kliūties aptikimo atstumas yra nedidelis, vadinasi valdymo kompiuteris nieko nelaukdamas privalo daryti automobilio valdymo korekciją, kad jis neatsitrenktų į kliūtį. Tačiau šiuo atveju situacija netgi sudėtingesnė nei pas bites – automobilis juda tik plokštumoje, o jo ratai gali sukiotis tik tam tikru kampu. O kur dar reikalavimai saugiam posūkiui – žodžiu, problemų netrūksta.

Sistemos veikimo principas
©Nissan
Nors kol kas tokia sistema daugiau koncepcinė ar idėjinė, nelabai įsivaizduotina realiame automobilyje, tačiau Nissan konstruktoriai žvelgia optimistiškai – kažkada tokie davikliai panaikins arba bent jau labai sumažins avarijų pavojų.