Tokio roboto panaudojimo galimybės labai plačios. Povandeniniai robotai, apčiuopiantys aplinką gali būti panaudojami atviros jūros naftos gręžimo platformose, apžiūrint ir taisant povandeninius kabelius, renkant pavyzdžius ir atliekant kitas įvairias giliavandenes užduotis. Dabar mokslininkai susikoncentravę ties roboto geresniu orientavimusi aplinkoje ir tikisi, kad ateityje jis galės atskirti kliūtis ir sroves, bei jų išvengti.
Robotas jau dabar gali panėręs į jūrą ir nuplaukęs iki povandeninio kabelio atlikti būtinus pataisymus, tačiau tam reikia labai didelio operatoriaus tikslumo ir įgūdžių - aplinkui visiškai tamsu ir roboto lempa mažai ką pagelbėja. Be to, srovės bando nunešti robotą toliau atliekamų darbų vietos. Todėl projektuotojai stengiasi, jog ateityje robotas pats surastų kelią. Sensorius, kuris suteikia lietimo jutimą turėtų savarankiškai padėti suprasti povandeninę aplinką.
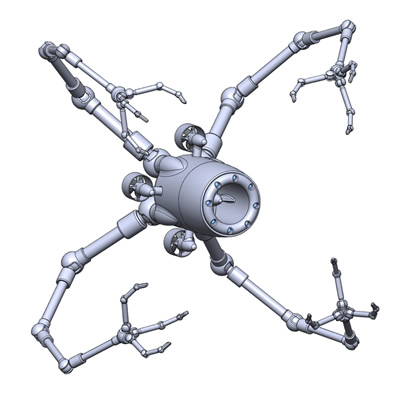
„Vienas komponentas šitame įtaise yra tenzometras,“ - sako Marcus‘as Maivald‘as, projekto vadovas iš Frauhofer‘io instituto. Kartu su savo kolegomis iš instituto ir komanda iš Vokietijos tyrinėjimų centro, dirbančia ties dirbtinio intelekto tobulinimu, jis sukūrė roboto modelį, kuris turi lietimo gebą.
„Jei robotas netikėtai susiduria su kliūtimi, tenzometras deformuojasi ir pasikeičia elektrinė varža. Mūsų tenzometras yra ypatingas tuo, kad jis nėra priklijuojamas, o tiesiog uždažomas – tai reiškia, kad sensorių galima įmontuoti ant įvairių iškreiptų roboto paviršių.“
Viena tokia uždažyta juostelė yra vos kelių mikrometrų pločio, t.y. maždaug perpus mažiau nei žmogaus plaukas. Todėl, lietimo jutikliai gali būti dedami arti vienas kito, taip nustatant kur tiksliai robotas liečia kliūtį. Taip pat, jis apsaugotas ir nuo jūros druskingumo.
Tam, kad pagamintų tokius tenzometrus, tyrinėtojai pasitelkė nanodaleles ir sukūrė atitinkamą aerozolį. Programinė įranga paskirsto aerozolio srovę į reikiamas vietas, tam, kad neliktų neapipurkštos vietos. Mokslininkai povandeninį robotą pristatinėti ketina „Sensor and Test trade“ parodoje, kuri vyks gegužės 26-28 dienomis Niurnberge.