Jau daugelį metų mokslininkai kuria vis naujus būdus, kaip autonominiai robotai galėtų judėti kitų planetų paviršiumi, nuo ratais riedančių marsaeigių iki sudėtingų žingsniuojančių mašinų, o studentas Rhodri Armour iš Bath universiteto (Anglija) pasiūlė dar vieną judėjimo būdą – riedantį ir šokinėjantį robotą.
Žingsniuojančius robotus yra keblu valdyti, pargriuvus ant sudėtingo paviršiaus, jiems gali nebepavykti atsikelti, o ratuotos mašinos turi labai ribotas galimybes įveikti aukštesnes kliūtis.
Eilinį kartą buvo pasižiūrėta į gamtą - kaip kliūtis įveikia vabzdžiai, o jie jas paprasčiausiai peršoka.
Šis robotas yra pavadintas „Jollbot“, jis panašus į iš vielų susuktą sferą su valdymo mechanizmu viduryje.
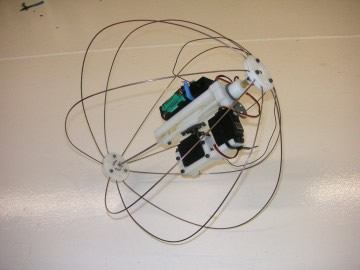
„Jollbot“ gali riedėti bet kokia kryptimi, nebijodamas, kad apvirs ant šono (nes šonų jis paprasčiausiai neturi), o sutikęs kliūtį – įsitempti ir ją peršokti. Jis nesunkus, sveria vos vieną kilogramą, o nusileidus po šuolio jo vielinis korpusas sugeria smūgio energiją ir robotas gali tęsti savo judėjimą toliau.
„Gyvūnai naudojasi įvairiomis šokinėjimo formomis, pavyzdžiui, kengūra liuoksi, pasinaudodama savo stipriais raumenimis, o žiogas pirma sukaupia energiją savo kojų raumenyse, o po to daro ilgą šuolį. Mūsų robotas naudojasi antruoju būdu – elektros varikliai lėtai sutraukia spyruokliuojantį korpusą, ir robotas tampa ne sferos, bet moliūgo formos, o po to ši energija yra staiga išlaisvinama“, sakė Rhodri Armour. „Šį robotą galima ir padengti saulės elementų „oda“, tuomet jis pats galės apsirūpinti energija“.
Įdomu, kad roboto dalys buvo pagamintos greito prototipų kūrimo spausdintuvu „RepRap“, kuris iš plastiko pagal kompiuterinį modelį gali pagaminti trimačius daiktus.


