Waseda universiteto specialistai ir toliau atkakliai tobulina roboto – muzikanto idėją. Dabartinis modelis įgavo ne tik „tipinę“ roboto išvaizdą, tačiau patobulėjo ir jo muzikiniai sugebėjimai.

Dirbtiniai roboto pirštai gali judėti
8 Hz dažniu - tai pakankamai didelis greitis tokiai sistemai
Dabartinė modifikacija gali praktiškai be klaidų atlikti daugumą fleitai skirtų kurinių. Nors pačią tokio roboto koncepciją mokslininkai vystė jau nuo 9 dešimtmečio pabaigos, tačiau pirmasis realus roboto prototipas pasaulį išvydo 2002 metais. Dabartinis modelis yra būtent ankstesnio prototipo patobulinta versija, sugebanti žymiai plastiškiau pareiti tarp skirtingų natų.
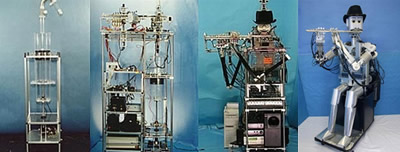
Idėjos evoliucija: WF1 (kairėje, 1990), WF2 (1992), WF3RIX (2002) ir dabartinis modelis WF-4RIV
Kodiniu pavadinimu WF-4RIV pakrikštytas robotas turi elastingas lūpas, kurių forma keičiama automatiškai pagal grojamos muzikos skambesį. Grojimui reikalingą suspaustą orą teikia dirbtiniai plaučiai.
Be viso to, robotas dar turi dvi kameras ir vaizdo apdorojimo sistemą, leidžiančią iki tam tikro lygio bendrauti su auditorija ir kitais muzikantais. Kaip visa tai atrodo realybėje, galite pažiūrėti video intarpe. Ir prie to pačio pamąstyti apie tai, kas laukia ateities muzikantų, jei tokie robotai taip sparčiai tobulės ir toliau.